Start Chapter MCQ Quiz
Simplified Notes: Class 11 Physics Chapter 6 System of Particles and Rotational Motion Notes
1. Introduction: Moving Beyond the Point | Class 11 Physics Chapter 6 System of Particles and Rotational Motion Notes
Hello students! Welcome to Chapter 6. Up until now, we have been cheating a little bit. Whenever we talked about a car moving or a ball flying, we treated it as a single point particle. We ignored its shape and size. We assumed every part of the car moves in the exact same way.
But in the real world, things are not just points. They have size, shape, and structure. Imagine throwing a hammer. The handle spins, the head spins, but the whole thing also moves forward. How do we describe this complicated motion?
We need to upgrade our physics toolkit. We are now entering the world of Rigid Bodies and Rotational Motion.
2. Beyond Single Particles: Rigid Bodies and Center of Mass
First, let’s define what we are studying. A System of Particles is just a collection of many particles interacting with each other. A cricket ball is a system of billions of atoms.
A Rigid Body is a special kind of system where the distance between any two internal particles remains absolutely fixed. Even if you spin it or throw it, it doesn’t stretch, squash, or bend. A steel ball is a good example of a rigid body; a water balloon is not.
2.1 The Center of Mass (CM)
Imagine a spinning frisbee flying through the air. Every point on the frisbee is doing a crazy spiral motion. But there is one single point that moves in a perfectly smooth, simple parabola, just like a point particle. That magical point is the Center of Mass (CM).
Definition: The Center of Mass is a point where the entire mass of the system can be assumed to be concentrated.
It is the “average position” of all the mass in the object.

Figure 1: The motion of a hammer. Notice how the handle spins wildly, but the Center of Mass (marked with a dot) follows a clean, simple path.
2.2 Finding the Center of Mass
For simple shapes, it’s easy:
– Two Particles: The CM lies on the line joining them. If masses are equal, it’s exactly in the middle. If one is heavier, the CM is closer to the heavier mass (just like a see-saw balance point).
– Symmetric Bodies: For a sphere, ring, disc, or cube, the CM is at the geometric center.
Note: The Center of Mass does not have to be inside the body! For a ring or a hollow sphere, the CM is in the empty space in the middle.
2.3 Motion of Center of Mass
This is the most important concept.
M A_cm = F_ext
This equation says: The Center of Mass moves as if all the mass (M) were concentrated there and all external forces (F_ext) were applied there.
The Firework Example:
Imagine a firework shell launched into the sky. It follows a parabolic path. Suddenly, it explodes into a thousand colorful fragments flying in all directions.
What happens to the CM?
Since the explosion is caused by internal forces, it cannot change the motion of the CM. The Center of Mass of all the fragments continues to follow the original parabolic path until the fragments hit the ground!
3. Rotational Motion: The Spin
When a rigid body spins around a fixed line, we say it is in Rotational Motion. This fixed line is called the Axis of Rotation.
Let’s translate our “Linear Language” (straight line motion) into “Rotational Language”.
The Translation Dictionary
| Concept | Linear (Straight) | Rotational (Spin) |
|---|---|---|
| Position | Displacement (x) | Angular Displacement (θ) |
| Speed | Velocity (v) | Angular Velocity (ω – omega) |
| Change in Speed | Acceleration (a) | Angular Acceleration (α – alpha) |
| The Cause | Force (F) | Torque (τ – tau) |
| Resistance | Mass (m) | Moment of Inertia (I) |
Relation between Linear and Angular:
v = rω (Linear velocity depends on how far ‘r’ you are from the axis).
This is why the outer edge of a fan blade moves faster than a point near the center, even though they both complete one rotation in the same time.
4. Torque (τ): The Turning Force
If you want to push a box, you apply Force. If you want to twist a bottle cap or turn a steering wheel, you apply Torque.
Torque is the “turning effect” of a force. It depends on two things:
1. How hard you push (Force F).
2. Where you push (Distance ‘r’ from the axis).
The Door Example:
Why is the handle of a door placed at the edge, far away from the hinges?
Because Torque = Force × Distance.
By maximizing the distance (r), you need very little force (F) to generate enough torque to open the door. Try pushing a door near the hinges—it is incredibly hard!
Formula: τ = r × F (Vector Cross Product)
Magnitude: τ = r F sin θ
Here, θ is the angle between the position vector and the force.
– Maximum Torque: When θ = 90° (Pushing perpendicular to the door).
– Zero Torque: When θ = 0° (Pushing the edge of the door towards the hinges). The door won’t rotate.
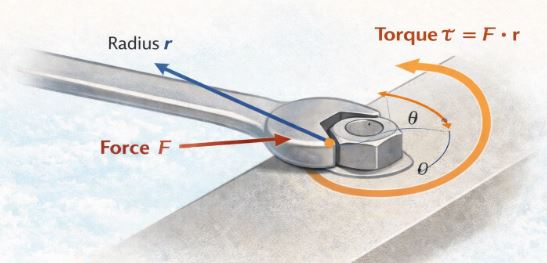
Figure 2: Using a wrench. A longer wrench (larger r) creates more torque for the same force, making it easier to loosen a tight nut.
5. Moment of Inertia (I): Rotational Mass
In linear motion, Mass determines how hard it is to accelerate an object.
In rotational motion, Moment of Inertia (I) determines how hard it is to spin an object.
But there is a catch! Rotational inertia doesn’t just depend on how much mass there is; it depends heavily on where the mass is located relative to the axis of rotation.
Formula: I = Σ m r²
(Sum of mass × distance squared).
The Dumbbell Experiment:
Imagine holding two heavy weights.
1. Hold them close to your chest and spin. Easy! (Mass is close to axis -> Low ‘I’).
2. Hold them out with arms fully extended and spin. Very Hard! (Mass is far from axis -> High ‘I’).
Even though the total weight is the same, the distribution changes the difficulty.
Common Moments of Inertia
- Thin Ring (Axis through center):
I = MR²(All mass is far away). - Solid Disc (Axis through center):
I = ½ MR²(Mass is distributed from center to edge). - Solid Sphere:
I = 2/5 MR². - Hollow Sphere:
I = 2/3 MR².
Insight: A ring is harder to spin than a disc of the same mass because all the ring’s mass is far out at the edge.
6. Angular Momentum (L): The Quantity of Rotation
Just as Linear Momentum (p = mv) is the “quantity of motion,” Angular Momentum (L) is the “quantity of rotation.”
Formula: L = r × p
Or for a rigid body: L = I ω (Moment of Inertia × Angular Velocity).
This is exactly like p = m v.
6.1 Conservation of Angular Momentum
This is one of the most beautiful and powerful laws in physics.
Law: “If the net external torque on a system is zero, its total angular momentum remains constant.”
L = I ω = Constant
This implies an inverse relationship: If I goes UP, ω goes DOWN (and vice versa).
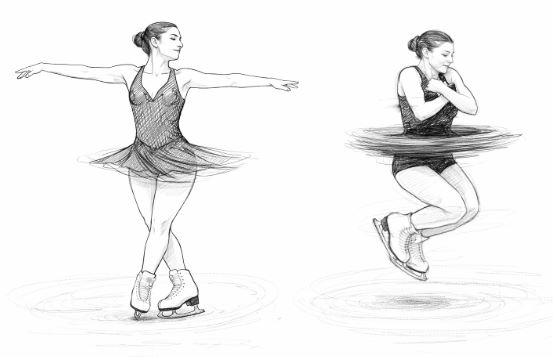
Figure 3: The Ice Skater Effect.
1. Arms Out: Mass is far from axis. Moment of Inertia (I) is Large. Angular velocity (ω) is Small.
2. Arms In: Mass is close to axis. Moment of Inertia (I) decreases. To conserve ‘L’, the skater spins faster automatically!
Other Examples:
– Divers: A diver tucks their body (curls up) to spin fast during a somersault, then straightens out (increases I) to slow down the spin just before hitting the water.
– Cat Falling: A cat dropped upside down twists its body to land on its feet using conservation of angular momentum.
7. Equilibrium of a Rigid Body
When we studied point particles, “Equilibrium” meant the net force was zero. But for a rigid body (like a ladder leaning against a wall), that’s not enough.
Even if the net force is zero, the object might still start spinning!
For a Rigid Body to be in total mechanical equilibrium, TWO conditions must be satisfied:
- Translational Equilibrium: The net external Force must be zero.
Σ F_ext = 0(It won’t start moving linearly). - Rotational Equilibrium: The net external Torque must be zero.
Σ τ_ext = 0(It won’t start rotating).
The See-Saw Example:
Imagine a see-saw. A 10kg kid sits 2m from the center on the left. A 20kg kid sits on the right. Where should the heavy kid sit to balance?
For Rotational Equilibrium (Balance), the torques must cancel.
Torque Left = Torque Right
r1 × F1 = r2 × F2
2m × (10g) = r2 × (20g)
20 = 20 r2 -> r2 = 1m.
The heavier kid must sit closer to the center (1m away) to balance the lighter kid.
8. Theorems of Moment of Inertia
Calculating ‘I’ for every axis using integration is hard. We use two clever theorems to find ‘I’ for different axes easily.
8.1 Theorem of Parallel Axes
If you know the Moment of Inertia about an axis passing through the Center of Mass (I_cm), you can find ‘I’ about any parallel axis.
Formula: I = I_cm + M d²
Where ‘M’ is total mass and ‘d’ is the perpendicular distance between the two parallel axes.
8.2 Theorem of Perpendicular Axes
This applies only to Planar Bodies (like a disc, ring, or sheet – 2D objects).
The moment of inertia about an axis perpendicular to the body (Z-axis) is the sum of moments of inertia about two mutually perpendicular axes lying in the plane of the body (X and Y axes).
Formula: I_z = I_x + I_y
9. Rolling Motion: The Perfect Combo
Rolling is a combination of two motions happening at the same time:
1. Translation: The Center of Mass moves forward in a straight line.
2. Rotation: The body spins around the Center of Mass.
Kinetic Energy of Rolling:
Total K.E. = Translational K.E. + Rotational K.E.
K_total = ½ M V_cm² + ½ I ω²
The Condition for Pure Rolling (No Slipping):
If a wheel rolls without slipping, the bottom point touching the ground must have zero velocity relative to the ground.
This leads to the relation: V_cm = R ω.
10. Practice Questions & Detailed Solutions
Let’s master these concepts by solving some thought-provoking questions.
Part A: Multiple Choice Questions (MCQ)
- The center of mass of a hollow sphere lies:
(a) On its outer surface.
(b) On its inner surface.
(c) At its geometric center.
(d) It depends on the material.Solution: (c).
Reasoning: For any symmetrical uniform body, the Center of Mass is at the geometric center. It doesn’t matter if there is no physical mass there (like in a hollow ball or a ring). The CM is a mathematical point.
- A boy on a merry-go-round walks from the edge towards the center. What happens to the moment of inertia of the system?
(a) It increases. (b) It decreases. (c) It remains the same. (d) Depends on rotation direction.Solution: (b) It decreases.
Reasoning: Moment of Inertia
I = Σmr². As the boy walks towards the center, his distance ‘r’ from the axis decreases. Since ‘r’ is squared, ‘I’ decreases significantly. - If the net external torque on a system is zero, which of the following will be constant?
(a) Angular velocity (b) Moment of inertia (c) Angular momentum (d) Kinetic energySolution: (c) Angular Momentum.
Reasoning: This is the definition of Conservation of Angular Momentum. Just like F=0 implies linear momentum ‘p’ is constant, τ=0 implies angular momentum ‘L’ is constant. Note that (a) and (d) can change if the body changes shape (like the ice skater).
Part B: Short Answer Questions
- Q: Why do tightrope walkers often carry a long pole?
Answer: This is a brilliant application of physics!
1. Increasing Moment of Inertia (I): By carrying a long pole, the walker distributes mass far away from the axis of rotation (the rope). This drastically increases ‘I’.
2. Resistance to Rotation: We knowτ = I α. For a given small torque (like a gust of wind trying to tip them over), a large ‘I’ results in a very small angular acceleration ‘α’.
This means the walker tips over very slowly, giving them plenty of time to adjust their balance and recover. - Q: Can an object be in translational equilibrium but not in rotational equilibrium? Give an example.
Answer: Yes, absolutely.
This happens when the net Force is zero, but the net Torque is non-zero.
Example: The Couple.
Imagine turning a steering wheel. You push up with your right hand (+F) and pull down with your left hand (-F).
– Net Force: F + (-F) = 0. (The wheel doesn’t move straight).
– Net Torque: Both forces create a turning effect in the same direction (Clockwise). The wheel spins.
So, it is in translational equilibrium but rotationally accelerating.
Part C: Long Answer Questions (Numerical Solving)
- Q: A solid cylinder of mass 10 kg and radius 0.2 m is rotating at 50 rad/s about its axis. An identical, non-rotating cylinder is gently dropped onto it, and they start rotating together. What is the final angular speed? (I for cylinder = ½MR²)
Answer:
This is a “Rotational Collision.” Since no external torque acts on the system (friction between them is internal), Angular Momentum is Conserved.
L_initial = L_finalStep 1: Calculate Initial Angular Momentum.
I1 = ½ M R² = ½ (10)(0.2)² = 5 × 0.04 = 0.2 kg m².
ω1 = 50 rad/s.
L_initial = I1 × ω1 = 0.2 × 50 = 10 kg m²/s.Step 2: Calculate Final Moment of Inertia.
Two identical cylinders are now rotating together.
I_final = I1 + I2 = 0.2 + 0.2 = 0.4 kg m².Step 3: Apply Conservation.
L_initial = I_final × ω_final
10 = 0.4 × ω_final
ω_final = 10 / 0.4 = 100 / 4 = 25 rad/s.
Concept Check: The inertia doubled, so the speed halved to keep momentum constant!
Read Also:
Class-11 Chapter 5- Work, Energy, and Power
For more check official website of
NCERT